open_link()¶
This function creates a component that is used to display iframe with title.
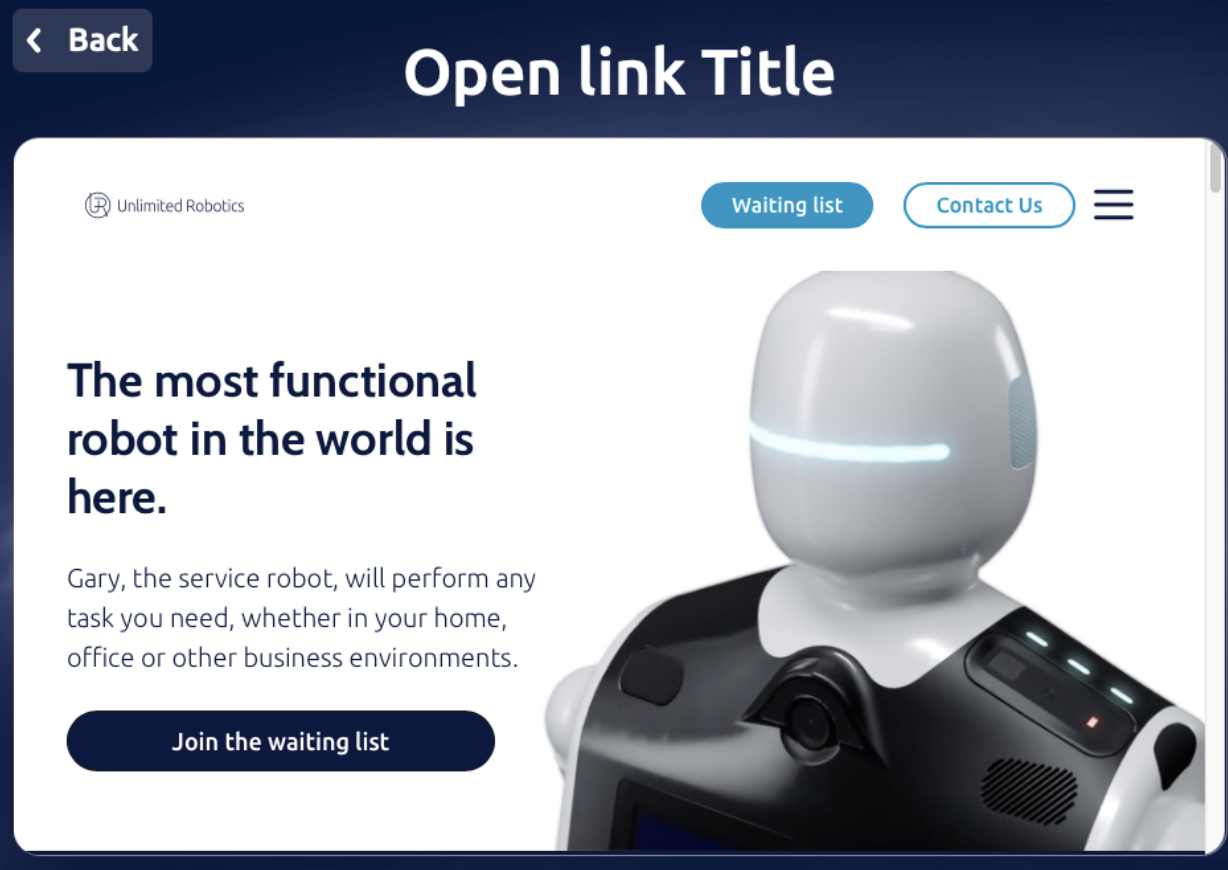
The open link component provides a window of an internet url(appears as it would on a search engine) by taking it as an argument. It provides a title to display information about the url. Users are able to interact with the url and view animations as they would be able to on a browser.
Reference¶
Explore more about this component here
Arguments¶
Arguments |
Type |
Default Value |
Description |
|---|---|---|---|
url |
Any (str) |
provided valid URL, usually in string format (mandatory) |
|
title |
string |
Title of the screen (mandatory) |
|
title_size |
enum |
|
Size of the title |
show_back_button |
bool |
False |
Show a button to go back |
back_button_text |
string |
“Back” |
Text of the back button |
button_size |
int |
1 |
Button size (1 = SMALL, 2 = MEDIUM, 3 = LARGE) |
languages |
list |
None |
List of languages to be displayed on the screen (optional) |
chosen_language |
str |
None |
If list given, string representing chosen language |
theme |
enum |
|
Enum to define the theme of the screen, check |
custom_style |
dict |
None |
Dictionary containing custom styles for the modal (optional) |
wait |
bool |
True |
Bool indicating to wait for user response (optional) |
callback |
callable |
None |
Callable function to handle the response (optional) |
See the complete list of enumerations.
Return¶
Dictionary that contains the action performed by the user
Example:
{'action': 'back_pressed', 'app_id': 'doctest'}
Exception¶
RayaUIMissingValueRayaNeedCallback
See the complete list of ui exceptions and the complete list of general exceptions.
Callback Arguments¶
callback¶
Argument |
Type |
Description |
|---|---|---|
data |
dict |
Dict containing the result of the action |
Example¶
...
class RayaApplication(RayaApplicationBase):
async def setup(self):
self.UI = await self.enable_controller('ui')
....
async def loop(self):
....
await self.UI.open_link(
title="Open Link title",
url = "https://www.unlimited-robotics.com/"
)
...
async def finish(self):
...
...